| 3D结构光原理及应用浅析 | 您所在的位置:网站首页 › aivi 3d结构光 › 3D结构光原理及应用浅析 |
3D结构光原理及应用浅析
|
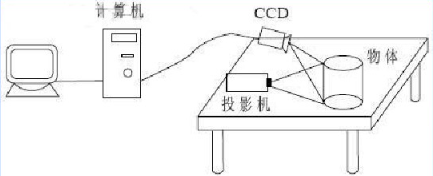
3D结构光,是近些年立体视觉图像处理应用比较热的方向,区别于双目立体视觉以及TOF(飞行时间),3D结构光深度相机模块 通常由一枚红外投影仪,红外相机以及一块专门用于计算深度的处理器组成,如下图所示: 再加上一枚彩色相机,就组成了一个标准的3D结构光模组。 结构光,顾名思意,为特殊的光源,通常分为三种:离散光斑、条形光,编码结构光;工作时,经过特定编码的光斑从投影仪投射到物体上,物体反射红外光,红外相机接收反射光,形成图片,根据光斑的畸变情况,计算物体各点距离相机平面的距离。 3D结构光投影成像模型 三维投影几何模型 3D结构光投影透视模型
就上式而言,对于一个像素点(X,Y),能计算出多个空间的点;因此,还需要添加新的约束,即结构光模块平面与模块平面共面(特殊约束,有特定约束关系即可)。 利用红外相机像素点信息求解被测物体深度信息需要经过:机构光解码、像素、空间坐标转换;为了满足获取深度信息的实时性,结构光模块内部一般会有一枚专用的处理芯片,用于计算并输出实时信息。 3D结构光目前的使用场景为:1)、物体信息分割与识别,3D人脸识别,用于安全验证、金融支付等场景; 2)、体感手势识别,为智能终端提供新的交互方式; 3)、三维场景重建,利用深度相机生成的深度信息(点云数据),结合RGB彩色图像信息, 可完成对三维场景的还原,可用于测距,虚拟装修等场景。 |





【本文地址】